Haptic Interfaces
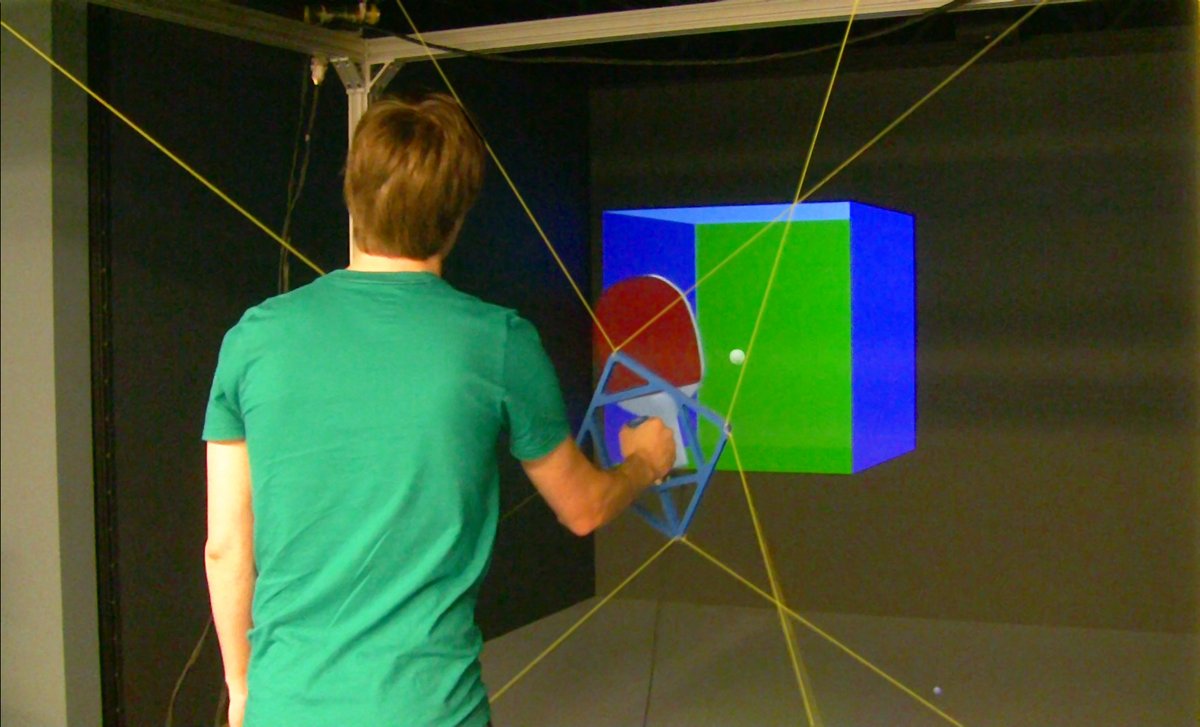
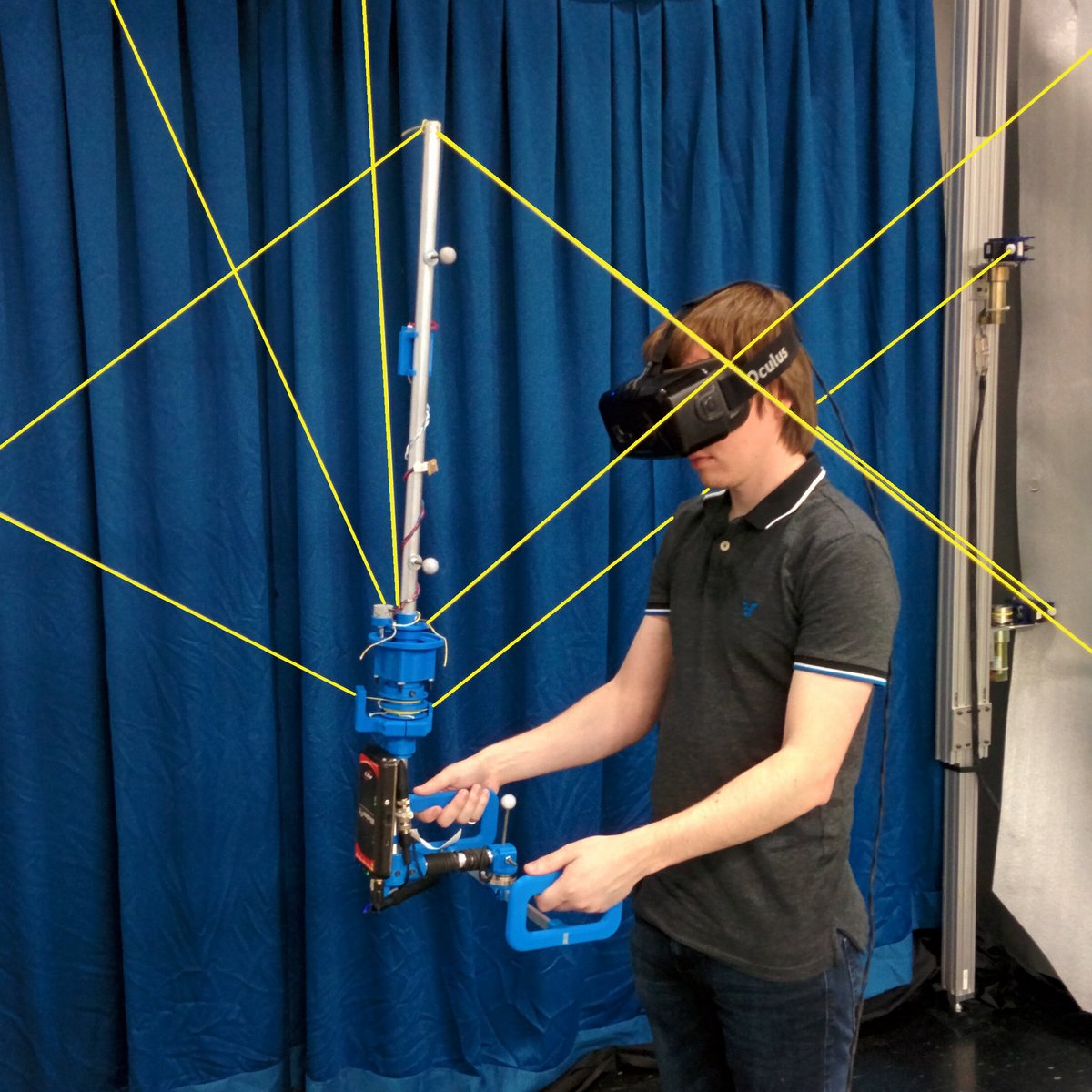
Cable-Driven parallel robots are increasingly used and studied, particularly in the field of research. One of the application of interest is their use as a haptic interface. Their large workspace and low inertia make them good candidates for human-sized interfaces. One of the interesting application is the use of this type of interface in the field of health, more specifically in physical rehabilitation. As these interfaces are able to reproduce efforts to the user, they can be used to train the muscles. It is with this in mind that research has been carried out in the laboratory. We present here cable-driven parallel mechanisms used as haptic interface combined with an immersive visual feedback like a virtual reality headset.