ACCELEROMETER ARRAYS
Accelerometer arrays are a type of inertial measurement unit that allows the estimation of the acceleration field of an object, i.e., accelerations of some or all of its points. Thence, one can infer the trajectory of the object. Because of their superior accuracy, the vast majority of inertial measurement units resort to mechanical gyroscopes rather than accelerometers to measure the angular velocity (angular rates) of an object. Nevertheless, due to their robustness, low cost and small energy consumption, accelerometer arrays have been preferred to gyroscope-based inertial measurement units in certain niche applications such as crashworthiness, projectile guidance and galloping robots.
At the Laval University Robotics Laboratory, research focuses on two aspects of accelerometer arrays: the theory behind accelerometer arrays and their use in human-machine interaction.

Theory behind Accelerometer Arrays
In a few words, the work underway at the Laval University Robotics Laboratory is best summarized by the questions it aims at answering:
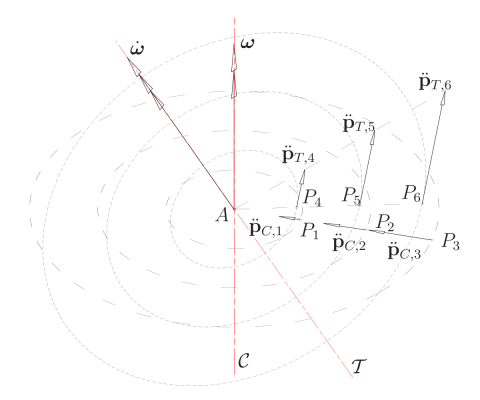
What accelerometer arrays allow the estimation of what components of a rigid body moving in space (the rigid-body acceleration field is depicted in Figure 2)?
What is the minimum number of accelerometers required to estimate the trajectory of an object in space?
How should accelerometers be positioned and oriented in order to give the best possible accuracy?
How should we combine the accelerometer estimates in order to obtain robust estimates of the usual kinematics parameters (e.g.: the acceleration of a reference point, the angular acceleration and the angular velocity)?
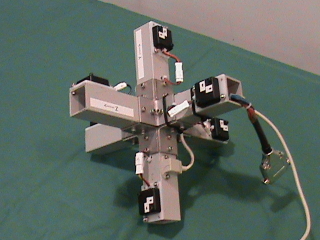
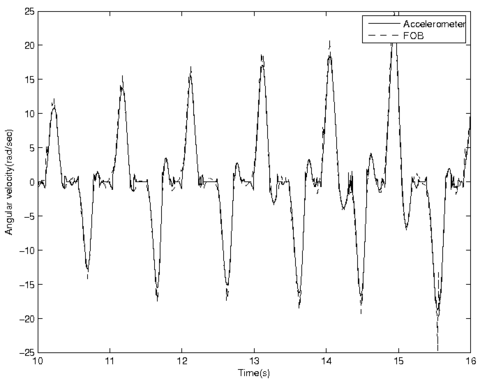
In order to answer this last question, an accelerometer array was built by Guillaume Fournier and Philippe Gagnon, two students from the Laval University Department of Mechanical Engineering. Because of its octahedral geometry (an octahedron is a polyhedron with eight faces, just like certain dice that are used in board games), this accelerometer array was baptised Octahedral Constellation of Twelve Accelerometers (OCTA). A pair of orthogonal accelerometers (small black boxes on the photograph) is located at each of the vertices of the regular octahedron. Guillaume and Philippe shook this accelerometer array while recording its measurements and those of a reference magnetic sensor that was attached to it (the small gray box on the picture). This latter sensor provided a reference for the six-degree-of-freedom displacements of OCTA. Guillaume and Philippe applied an algorithm developed at the Laval University Robotics Laboratory to extract the angular velocity of OCTA from its accelerometer measurements. They then compared these estimates to those obtained through a time-differentiation of the magnetic displacement sensor estimates. A sample of the obtained results appears in the graph below, where one sees that the estimates computed from accelerometer measurements are close to those obtained from the magnetic displacement sensor (FOB).
Human-Machine Interaction
A natural sequel of the work by Guillaume and Philippe would consist in using accelerometers in a device similar to the Nintendo Wii remote (or Wii-mote), which would allow the interaction with a virtual environment. The objective would be to increase the performance of the Wii remote (higher accuracy and wider measurement range) at a small additional cost. Such a device would find application in the video game industry, but also, potentially, in computer-assisted design, and in teleoperation tasks (tasks where one is to control a robot from a distance).